
95% van alle verkeersongevallen wordt veroorzaakt door menselijke fouten. Met autonome voertuigen wordt het verkeer dus veiliger. Daarom werken studenten aan de TU Delft aan autonome systemen.
‘Veiligheid is niet de enige reden om autonoom rijdende voertuigen te ontwikkelen’, stelt professor Dariu M. Gavrila van het departement Mechanical Engineering van de TU Delft. ‘Het kan ook mobiliteit bieden aan mensen, die zelf niet in staat zijn om auto te rijden. Het kan ook meer comfort bieden aan de inzittenden, die zich niet hoeven in te spannen om auto te rijden en hun tijd aan boord nuttiger kunnen besteden. Er zijn ook economische redenen: je kunt bijvoorbeeld veel geld besparen wanneer je vrachtwagens zonder chauffeur kunt laten rijden.’
Techniek Geluidsnormen: Geluid in Oostenrijk
Uitdagingen
‘Om autonoom te rijden heb je vier dingen nodig: sensoren die de omgeving scannen, actuatoren die de auto bedienen en een brein, dat aan de hand van de sensoren bepaalt welke actie de actuatoren moeten ondernemen’, stelt Gavrila. ‘Daarnaast heb je een back office nodig, die de auto bijvoorbeeld voorziet van realtime kaartmateriaal en die desnoods in staat is om de auto via een remote control te bedienen. De grote uitdaging is om aan de hand van GPS-sensoren, camera’s, lidar- en radarsensoren een accuraat beeld van de omgeving te schetsen, waarmee het brein een actieplan en een koers kan bepalen. Een extra uitdaging is de scalability van het systeem. Wanneer je de autonome auto in een bepaalde stad ontwikkelt, werkt hij dan ook in een andere stad? En als die stad in een ander land ligt? Verkeersregels kunnen van land tot land verschillen, wegbelijningen en stoplichtopstellingen zijn in de VS anders dan in Nederland. Gedrag van mensen kan anders zijn. Je moet uitvinden wat de verschillen zijn. Artificial Intelligence moet op de lokale omgeving worden getraind’, aldus Gavrila.



Hindernissen
Voor het computerbrein zijn er een aantal hindernissen te overwinnen. ‘GPS werkt goed met mooi weer en open terrein, maar in een stad tussen hoge gebouwen werkt het minder goed. GPS-sensoren werken helemaal niet in tunnels. Daar is bovendien veel reflectie. Ook sneeuw heeft veel reflectie, wat de waarneming van optische en andere sensoren kan verstoren. Dan zijn er nog zogenaamde edge-cases. Mensen, die met carnaval verkleed zijn, moeten ook als mens worden herkend, net als verkeersregelaars, die reflecterende jasjes dragen. Al die uitdagingen worden groter als je kosten probeert te besparen’, aldus Gavrila. ‘Lidar is duur, wij proberen nu de goedkopere radarsensoren te verbeteren, zodat we het wellicht zonder lidar kunnen. Daarnaast proberen we om de software sneller te laten werken door groepen te identificeren en plaats van individuen.’
Motorfietsen
De stellingen van Gavrila krijgen voor motorrijders extra gewicht als je ze ziet in het licht van de ongevallen, die met Tesla’s gebeurden in de VS. In een artikel in FortNine werd gesuggereerd dat de software van Tesla motorrijders over het hoofd zag wanneer ze in de autonome highway-assistant reden, met dodelijke ongevallen tot gevolg. Er kunnen dan dus twee dingen aan de hand zijn: de sensoren van de Tesla nemen de motoren niet of te laat waar, of de sensoren zien ze wel maar software classificeert ze niet als een object waar de auto omheen moet rijden. FortNine suggereert dat de sensoren aan de basis van het probleem liggen: Tesla zou uit bezuinigingsoogpunt geen lidar en radar gebruiken, maar alleen gebruik maken van optische sensoren. De software heeft dus minder data om de vrije ruimte te berekenen en maakt daardoor fouten.
Fietsen
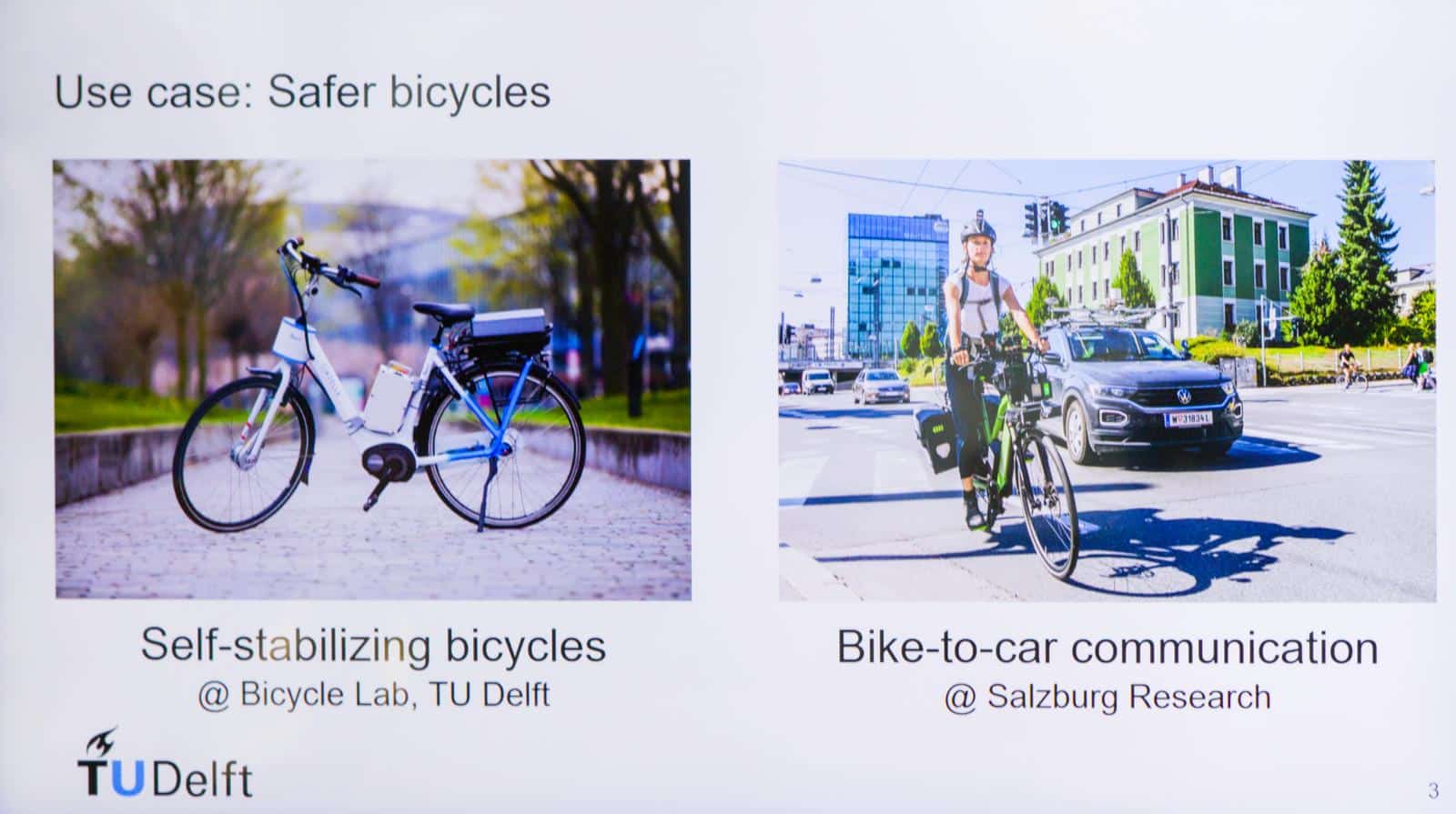
In Nederland hebben we natuurlijk niet alleen motorfietsen, maar ook heel veel fietsen, met vergelijkbare problemen. Ze zijn smal en zijn hier en daar nogal doorzichtig, waardoor ze moeilijker waar te nemen zijn. Er gebeuren ook best veel ongevallen mee. De TU Delft doet daar onderzoeken mee en heeft ook een zelf-stabiliserende fiets gebouwd, die vol hangt met sensoren. Dat is op zich alweer een uitdaging, want een fiets heeft weinig ruimte en de stijfheid van het frame houdt doorgaans niet over. Het hele systeem moet dus weinig input vragen, weinig kosten en weinig energie gebruiken. De fiets is bovendien voorzien van bike-to-car communicatie. Zo wordt gekeken hoe de veiligheid van de tweewieler kan worden vergroot, iets waar dus ook de motorrijder van zal kunnen profiteren.
Techniek: hoe serieus is de Honda V3 met elektrische turbo?
Geluid
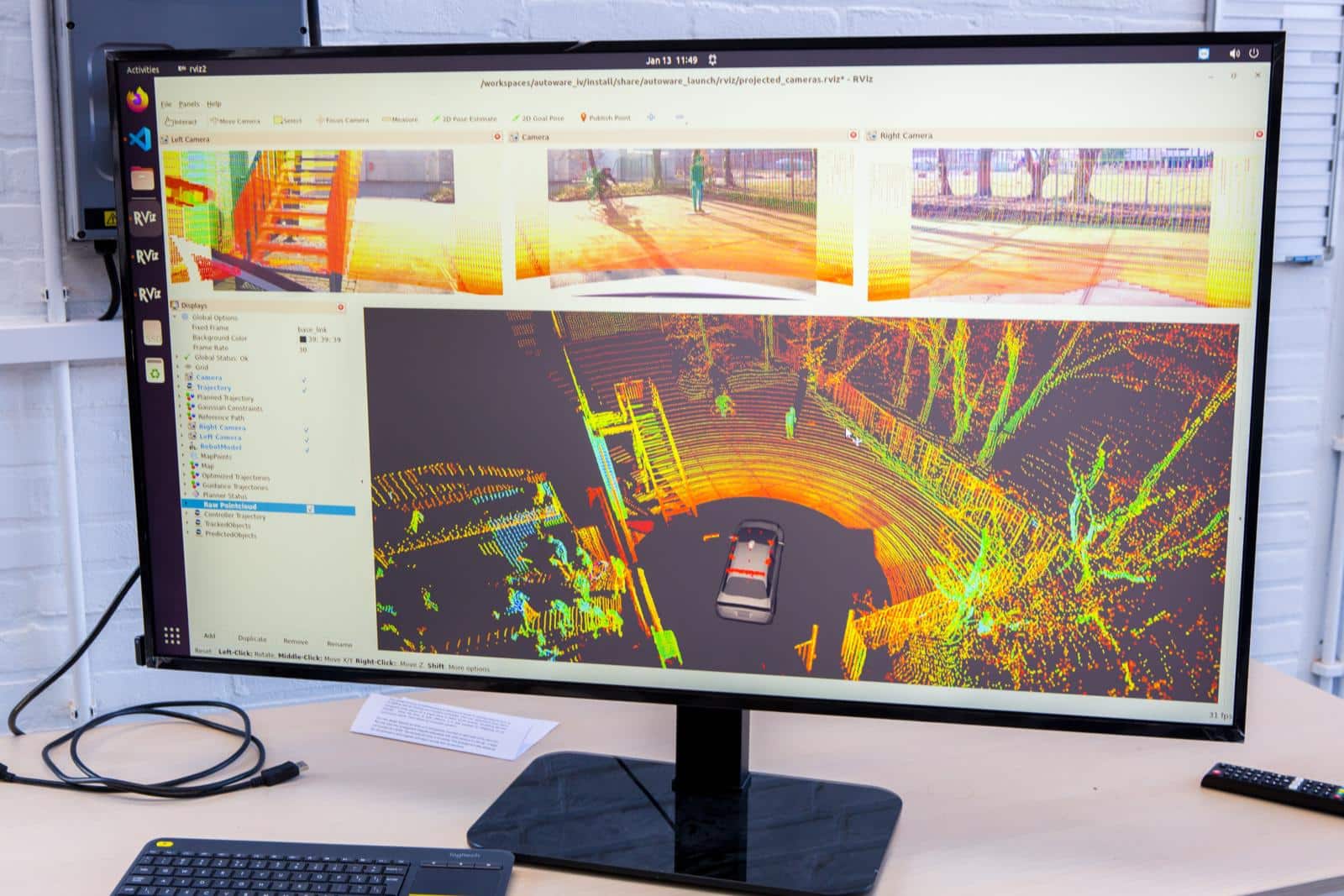
Voor onderzoek heeft het departement Mechanical Engineering een Toyota Prius uitgerust met lidar, radar, GPS en met optische camera’s, waarbij de overlappende beelden via een neural network en deep learning tot één beeld worden samengevoegd. Opvallend is dat de Prius rondom ook nog een aantal microfoons heeft, acht aan elke zijkant. Dat heeft extra informatie. Geluid, zoals de sirene van een ziekenwagen, is vaak van verder weg waarneembaar. Omdat geluid met een vaste snelheid van 320 m/s voortschrijdt, geeft het tijdsverschil, waarmee de microfoons de geluiden waarnemen, informatie over de richting en de afstand van het geluid. Op een scherm is te zien hoe een persoon, die een fluittoon produceert, door de geluidssensoren vrij exact wordt waargenomen. Ook geluid geeft dus waardevolle informatie aan het besturingssysteem van de autonome auto.
Teledrive
Wat gebeurt er wanneer een autonoom rijdende auto niet meer functioneert? Dat is vooral belangrijk bij vrachtwagens zonder chauffeur, zoals die nu bijvoorbeeld al rondrijden bij grote containeroverslagbedrijven. Dan moet iemand in een back office de besturing kunnen overnemen. Uiteraard heb je daar een goede communicatie voor nodig. De TU Delft doet het op dit moment op basis van 5G. De besturingsunit heeft drie schermen, die het beeld van de frontcamera’s weergeven. De snelheid, de acceleratie en de zijdelingse kracht worden vanuit de Inertia Measurement Unit (IMU) in de auto weergegeven op een van de schermen. Daarnaast wordt er geluid weergegeven uit een microfoon in de auto voor auditieve feedback. Op basis van deze gegevens kan een operator de auto vanuit het kantoor bedienen en eventueel naar een veilige plek rijden.



Platooning
Een speciale toepassing van autonoom rijden is platooning. Hierbij laat je een aantal (vracht-)wagens in konvooi vlak achter elkaar rijden. Door dit slipstreamen ervaren de volgauto’s minder luchtweerstand en daalt het brandstofverbruik, terwijl de gezamenlijke auto’s ook minder ruimte op de weg innemen en ze dus efficiënter gebruikmaken van het wegennet. Uitdagingen hierbij zijn dat de volgauto’s minder remweg ter beschikking hebben en dus min of meer tegelijk moeten remmen met de voorste auto. Dat kan dus alleen wanneer ze razendsnel de informatie krijgen die daarvoor nodig is. Dat gebeurt in principe via WiFi, maar de auto’s zijn ook uitgerust met een kleine lidar. De TU Delft onderzoekt nu onder meer wat er gebeurt als de WiFi-communicatie wordt gecorrumpeerd – bijvoorbeeld door een malafide organisatie – en hoe het konvooi daarop moet reageren, bijvoorbeeld door de gecorrumpeerde auto terug te laten zakken en achteraan het konvooi te laten aansluiten.
Wagenziekte
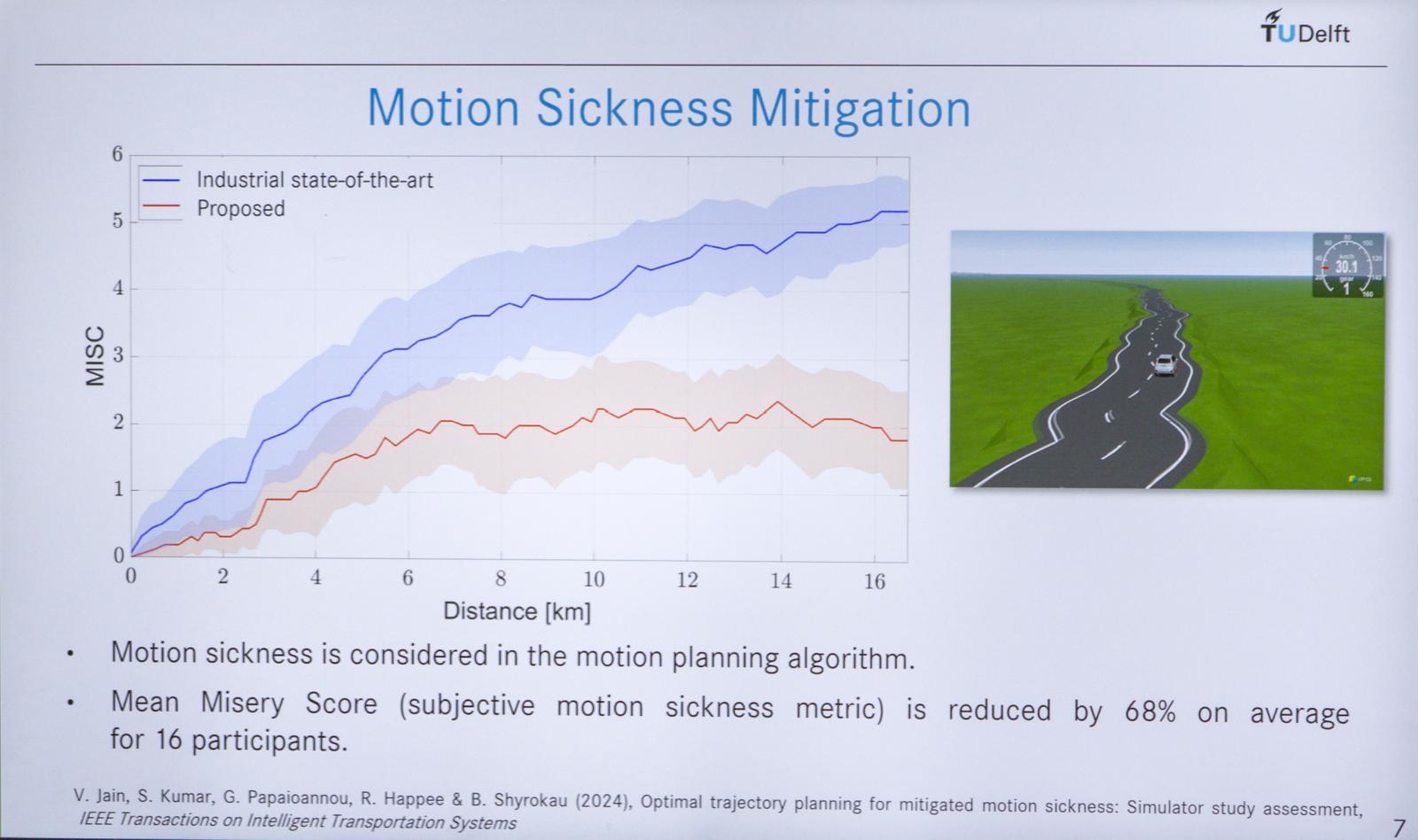
Twee derde van autopassagiers heeft in meer of mindere mate last van autoziekte. Dat heeft niet alleen te maken met het veersysteem van de auto, maar ook met de rijstijl van de chauffeur of, in het geval van een autonoom rijdende auto, de gekozen strategie van het autonome brein van de auto. De TU Delft doet er onderzoek naar en heeft bijvoorbeeld ontdekt dat de drempel voor voorwaartse acceleratie bij 1,23 m/s² ligt en dat Motion Sickness accumulatief werkt. Dat laatste is vooral van invloed op bochtige wegen waar je steeds zijwaartse acceleratie ondervindt. Het doel van het onderzoek is om uit te vinden welke rijstijl een autonome auto moet hebben om de inzittenden comfortabel te vervoeren en om eventueel een keuze te geven in rijstijlen, tussen snel maar niet zo comfortabel of langzamer maar wel comfortabel. Daartoe is een enorme simulator gebouwd waarin rijstijlen kunnen worden nagebootst.
Interactie
Wanneer autonome voertuigen over onze wegen rijden, moeten ze het wegdek delen met door mensen bestuurde voertuigen. Ze moeten dus reageren op menselijke bestuurders, die op hun beurt moeten reageren op de autonome voertuigen, die zich misschien iets anders gedragen dan men van een collega mens zou verwachten. Ook daar doet de TU Delft onderzoek naar, met rijsimulatoren waarbij rijders bijvoorbeeld moeten invoegen op een weg, waarop een andere auto rijdt. Die kan autonoom of door een andere rijder worden bestuurd. Uit een paar kleine testjes waarbij wij aanwezig waren blijkt dat het niet gemakkelijk te raden is met welk voertuig je van doen hebt.
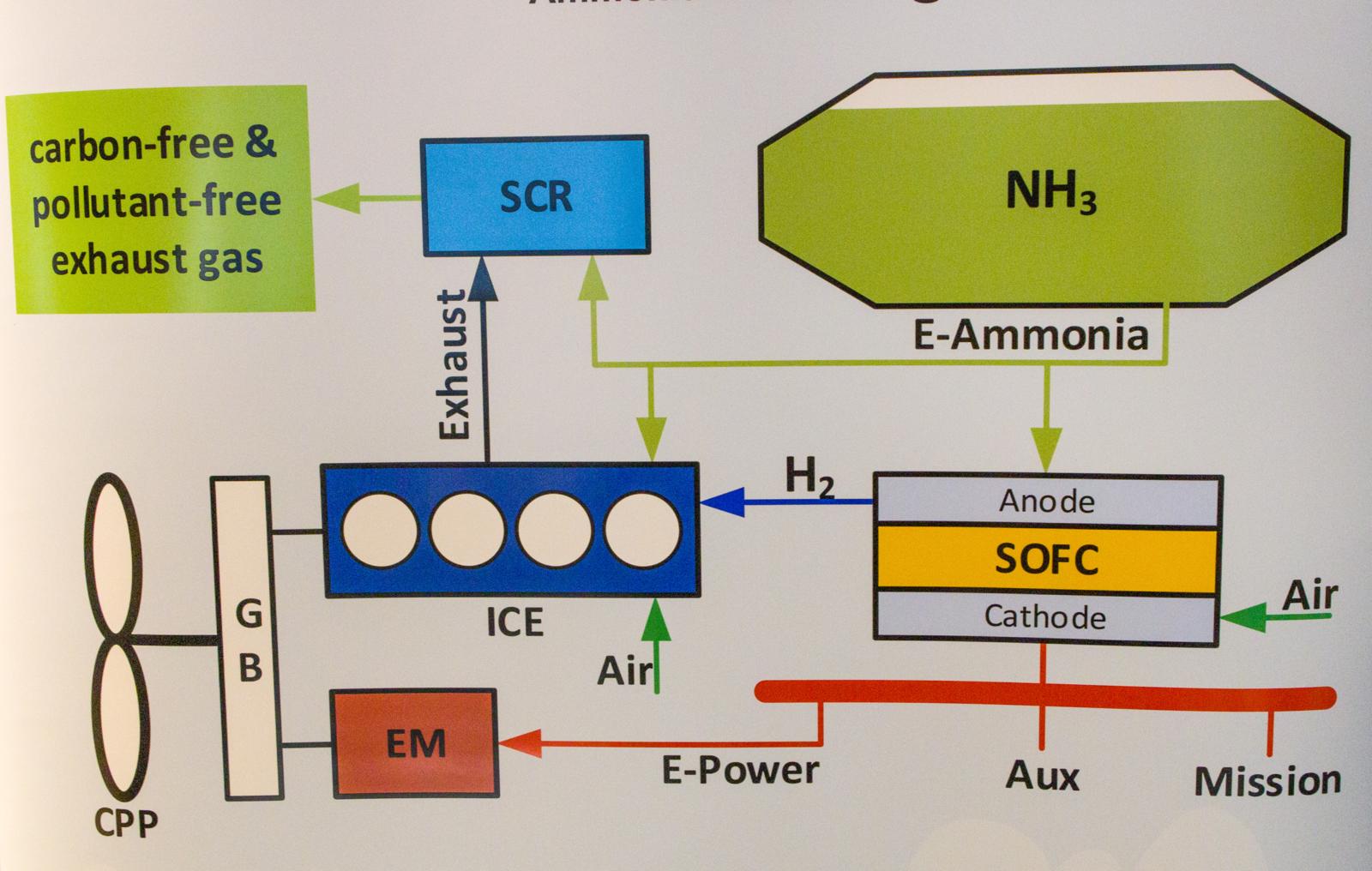
| Ammoniak als brandstof |
| Hoewel sommige politici de verbrandingsmotor uit willen bannen, zijn mensen die in staat zijn tot meer genuanceerde gedachteprocessen ervan overtuigd dat deze aandrijving toch onmisbaar is voor de toekomst. De reden daarvoor is eenvoudig: we kunnen zelf nooit genoeg zonne- en windenergie produceren om alle huishoudens, fabrieken en mobiliteit volledig elektrisch te maken. We moeten dus energie inkopen. Als dat CO2-neutraal moet, moeten daarvoor velden met zonnepanelen worden aangelegd op plekken waar genoeg zon en ruimte is. Te denken valt aan de Sahara en de Victoriawoestijn in Australië. Dan is de vraag hoe je die energie hier krijgt. Door de enorme afstanden kan dat alleen door die energie op te slaan in een gemakkelijk te transporteren molecuul. Oftewel, je kunt met behulp van zonne-energie water en CO2 ontleden en daarvan methanol maken. Een andere mogelijkheid, waar de afdeling scheepvaart van de TU Delft naar kijkt, is om zeewater te ontleden in waterstof en zuurstof en de vrijgekomen waterstof te binden aan stikstof. Dan krijg je NH3, oftewel ammoniak. Dat is een brandbaar gas dat je in grote tankschepen kunt vervoeren. Bij kamertemperatuur is slechts 9 bar nodig om er een vloeistof van te maken. Nu brandt ammoniak moeilijk. Er is een pilot-brandstof nodig om het aan te steken. Bijvoorbeeld waterstof, afkomstig uit ammoniak. Daarvoor moet die ammoniak in een soort brandstofcel worden gescheiden in waterstof en (onschadelijke) stikstof (N2). Daarbij komt elektriciteit vrij die voor boordstroom of elektrische ondersteuning van de aandrijving kan plaatsvinden. De waterstof kan samen met andere ammoniak naar de verbrandingskamer van de motor worden geleid en tot ontbranding worden gebracht. Eventuele stikstofoxiden die daarbij ontstaan, kunnen in een SCR-katalysator met behulp van, alweer, ammoniak onschadelijk worden gemaakt. Voor deze aandrijving zal wel een aparte verbrandingsmotor moeten worden ontwikkeld met een compressieverhouding – waarover gesproken wordt – van 35:1 (bron: www.cumela.nl). |


Foto’s: Peter Aansorgh

Als je leest wat voor systemen er allemaal bij komen kijken om autonoom te kunnen rijden, dan kun je ook wel nagaan hoe ingenieus de mens in elkaar steekt na duizenden jaren van evolutie. De meeste mensen bewegen zich toch wel vrij probleemloos voort heden ten dage ! Een mens maakt inderdaad fouten, maar kan ook anticiperen op andermans fouten.